▍文章来源于康谋
一、引言
在一线从事高阶ADAS仿真测试的工程师,大概率都经历过这样的困境:在CARLA等传统仿真器中表现良好的感知算法,一旦部署到实车上,就会出现漏检和误触发。
根本原因在于,传统图形学仿真器基于人工建模的几何网格与光线追踪,渲染出的摄像头画面过于理想化,缺少真实世界中普遍存在的非均匀光照、镜头畸变、运动模糊和多源噪声。这种“虚实域差异”使得耗费巨资搭建的仿真系统难以有效服务于端到端模型的测试验证。
2023年底以来,神经渲染技术带来了新的方向。3D高斯泼溅(3D Gaussian Splatting, 3DGS)凭借其显式的三维空间表征和实时渲染保真度,能够基于实车采集的数据快速构建高保真的数字孪生场景,直接回应了仿真感知域的核心诉求。
然而,从实验室走向工程量产,3DGS仍然面临多模态传感器物理建模缺失、路网语义断层、硬实时接入延迟等系统性瓶颈。本文旨在梳理当前技术现状,并探讨面向量产落地的双轨策略:“功能级 HiL 确定性物理注入 + 云端前馈可泛化 SiL 高并发生成”。
二、六大工程瓶颈
为了弄清楚 3DGS 到底离量产还有多远,我们需要从多模态感知适配、场景交互能力、工程落地效率等量产核心维度出发,可将3DGS技术的量产落地瓶颈拆解为六大核心问题,全面覆盖传感器仿真、场景重建、动态编辑、算力效率等关键环节。
摄像头仿真
在摄像头仿真方面,学术界与工业界推进最快。基于 nuScenes 和 Waymo 数据集,诸如 SplatAD 和 AutoSplat 等方案已经能够实现实时的相机渲染,峰值信噪比较传统的 NeRF 提升了 2~3dB。
然而,量产车型标配的超大畸变鱼眼镜头以及周视相机的接缝重叠区域,在 3DGS 中极易出现“印象派画作”般的伪影和拉伸。3DGUT 等环视适配方案,在解决多视角曝光不一致、动态鬼影方面,工程调优成本依然高昂。
LiDAR 仿真
目前 LiDAR-GS 和 GS-LiDAR 能够较好地模拟反射强度、回波以及射线漏检。但对于 50 米以外的远距离物体,由于点云稀疏,高斯基元的拟合精度断崖式下跌。
更致命的是,雨雪雾等极端天气下光束的散射与衰减,3DGS 目前缺乏严密的物理机制支撑,导致生成的点云数据无法直接用于极端工况的测试。
Radar仿真
相较于光学传感器,毫米波雷达的 3DGS 仿真目前处于极早期阶段。尽管有 RadarSplat 和 NeuRadar 等前沿探索,但雷达波在金属、路面、植被上的电磁散射具有极强的多径效应和多普勒效应。3DGS 的显式高斯点表征难以抽象这些物理特性,其仿真精度距离量产的感知评测要求仍有显著差距。
路网与语义重建
仿真需要的是车辆要在里面跑起来。3DGS在重建大范围城市场景时,由于缺乏长距离几何约束,容易出现路面微小起伏或塌陷。
同时,它无法直接导出符合OpenDrive规范的高精地图语义拓扑。如果仿真场景在视觉上逼真但缺乏车道线拓扑,则该场景只能用于感知评估,无法支持完整的规划控制闭环测试。
动态编辑
在 ADAS 测试中,我们需要灵活修改主车周围的交通流行为如突发的(Cut-in)。目前通过解耦静态背景与动态物体的 streetGaussians 方案,虽然支持对背景和车辆进行独立编辑,但在车辆大角度转向或加速时,高斯点云往往会出现撕裂或瞬间漂移。
由于缺乏足够的泛化能力,该方法难以生成从未采集过且符合物理规律的长尾碰撞场景。
训练与渲染效率
传统的 3DGS 依赖于“逐场景优化”。重构一段 20 秒的剪辑,往往需要数十分钟甚至数小时的训练。在功能级 HiL(硬件在环)测试中,每置换一个新场景就要重新加载数百兆的高斯文件,PCIE 总线的数据拷贝延迟直接打破了系统对确定性硬实时的要求。
三、量产落地的双轨策略
针对上述技术瓶颈,结合硬件在环、软件在环的差异化测试场景需求,本文提出“HiL确定性物理注入+云端SiL高并发生成”的双轨并行落地策略,兼顾实时闭环测试的确定性与大规模场景测试的泛化性、高效性。
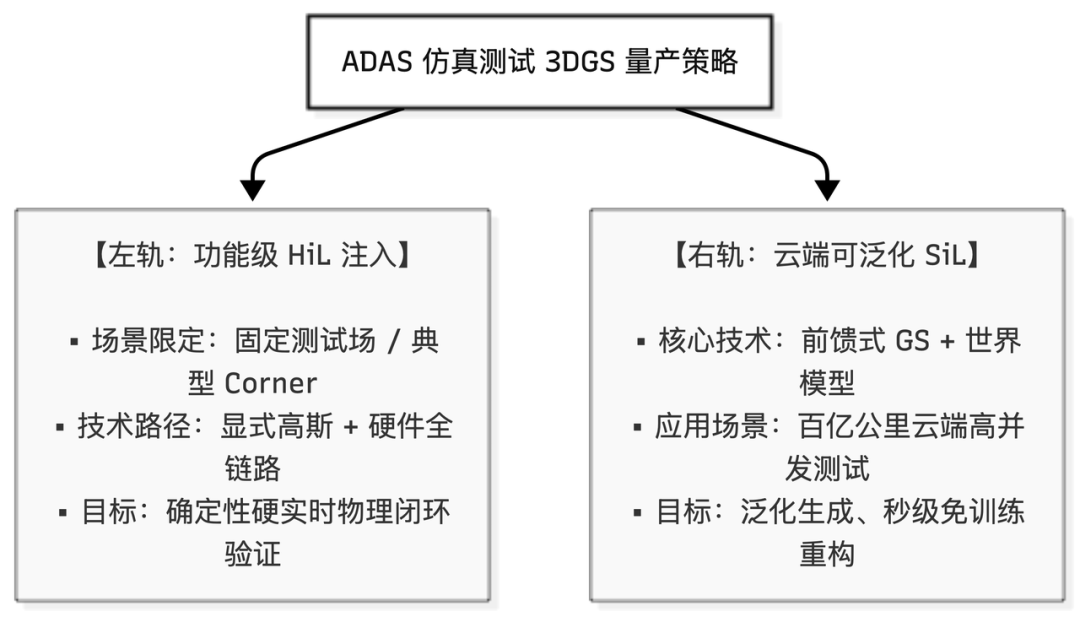
左轨:功能级 HiL 确定性物理注入
在硬件在环阶段,不追求大范围城区的无死角重建。而是针对固定的封闭测试场、特定路线(如高精测试场地、特定危险弯道)进行极度精细的 3DGS 显式重建,固化其高斯基元分布。
物理链路方面,通过定制化的渲染GPU服务器,将高保真相机渲染画面通过全链路视频注入到智能驾驶域控制器中。
雷达与高精地图部分:在3DGS负责视觉与LiDAR近场仿真的同时,通过基于数据驱动的Radar模型和高精地图提供完整的测试环境,通过多源融合打通硬实时闭环。
康谋-基于DMA的3DGS-HiL物理注入闭环仿真方案
右轨:云端前馈可泛化 SiL 高并发生成
在云端大规模软件在环(SiL)测试中,每天需要运行数百万个场景。目前耗时的“逐场景优化”可能无法满足,可以转向前馈式可泛化高斯技术与数据驱动世界模型的合流。
前馈式 3D/4D GS 技术的工业化
近两年的学术突破为这一路线提供了支撑。DGGT框架实现了无需相机外参、单次前馈推理即可预测包含动态运动信息和高斯点分布的4D驱动场景。这种免训练、直接推理的特性使云端高并发仿真成为可能。
同时,ADGaussian(ICRA 2026)等技术通过融合稀疏LiDAR深度信息和单目图像进行多模态联合学习,增强了3DGS在未知场景下的几何泛化与视角切换稳定性。
世界模型赋能长尾场景闭环
当可泛化高斯与动作条件化的世界模型(如Waabi World、GAIA-1)结合时,仿真系统可以具备场景生成能力。输入“前车爆胎并向左偏摆”等行为描述,世界模型负责生成符合物理逻辑的动态演化轨迹,可泛化高斯负责高保真渲染。此时的仿真系统兼具交互灵活性与物理真实感。
四、结语
3DGS在视觉保真度上的优势使其成为高阶智驾感知评测的重要技术路径。通过功能级硬件在环注入解决当前的感知闭环痛点,通过云端前馈高斯与世界模型攻克大规模泛化与长尾场景生成难题,行业正在以更高的精度和效率推动高阶自动驾驶的量产安全落地。
上述讨论梳理了3DGS在ADAS仿真测试中的主要瓶颈与应对思路。需要指出的是,这一技术路径仍在快速演进中,不同传感器(相机/LiDAR/雷达)的仿真成熟度存在显著差异,闭环仿真中的工程化落地也面临诸多细节挑战。康谋将于6月11日14:00在研讨会其一议题中,围绕《3DGS在ADAS仿真测试中的量产瓶颈与未来演进》主题,就以下四个板块进行更深入的分享:
3DGS自动驾驶仿真——从实验室到量产的现状总览
多模态传感器仿真的成熟度与瓶颈(相机/LiDAR/雷达)
闭环仿真与工程化落地的实践挑战
量产成熟度评估与核心落地建议
感兴趣的读者可在线上研讨会邀约 | 速通高阶智驾仿真测试——新一代智能驾驶仿真平台与应用!该文章中,关注该研讨会的详细议程与报名信息。
推荐阅读: